
पार्किंग प्रबंधन प्रणालियाँ 3डी की ओर बढ़ रही हैं
दुनिया भर के शहर पार्किंग प्रबंधन के बेहतर तरीकों का प्रयोग कर रहे हैं। कुछ लोग मूल्य निर्धारण को गतिशील रूप से समायोजित करने के लिए पार्किंग अधिभोग डेटा का उपयोग करते हैं, जिससे पर्याप्त स्थान की उपलब्धता सुनिश्चित होती है; अन्य लोग ग्राउंड सेंसर से सुसज्जित सड़क के किनारे पार्किंग सिस्टम तैनात करते हैं, उन्हें व्यापक स्मार्ट सिटी प्लेटफार्मों में एकीकृत करते हैं; फिर भी अन्य लोग हजारों व्यक्तिगत पार्किंग स्थानों की निगरानी के लिए नेटवर्क सेंसर का उपयोग करते हैं। इन पहलों का एक स्पष्ट उद्देश्य है: वाहनों की भीड़ को कम करना, सड़क के किनारे पार्किंग की दक्षता बढ़ाना और सीमित शहरी स्थान का अधिक प्रभावी उपयोग करना।
हालाँकि येपार्किंग प्रबंधन प्रणालीविश्व स्तर पर कई देशों में लागू किया गया है, कई अभी भी खंडित या अपूर्ण डेटा पर निर्भर हैं। ग्राउंड सेंसर/लूप डिटेक्टर की स्थापना और बड़े पैमाने पर रखरखाव महंगा है, जबकि कैमरा-आधारित निगरानी प्रणालियाँ प्रकाश की स्थिति के प्रति संवेदनशील हो सकती हैं या गोपनीयता संबंधी चिंताएँ पैदा कर सकती हैं। जैसे-जैसे शहर अपनी स्मार्ट पार्किंग पहल को बढ़ाना चाहते हैं, चुनौती केवल डेटा एकत्र करने में नहीं है, बल्कि इसे विश्वसनीय, कुशलतापूर्वक और बड़े पैमाने पर करने में है।
LiDAR तकनीक पार्किंग प्रबंधन प्रणाली क्षेत्र में महत्वपूर्ण लोकप्रियता हासिल करने लगी है। LiDAR - लाइट डिटेक्शन एंड रेंजिंग का संक्षिप्त रूप - भौतिक वातावरण के बारे में त्रि-आयामी जानकारी को सटीक रूप से कैप्चर करने के लिए लेजर पल्स को नियोजित करता है, जिससे आधुनिक पार्किंग प्रबंधन के लिए एक मजबूत डेटा आधार प्रदान किया जाता है। पार्किंग स्थान के अधिभोग की निगरानी से लेकर वाहन के प्रकारों को वर्गीकृत करने तक, LiDAR-आधारित सिस्टम ऑपरेटरों को पार्किंग की गतिशीलता में अंतर्दृष्टि प्राप्त करने के लिए ग्रैन्युलैरिटी के स्तर के साथ सशक्त बनाता है, जिसे पारंपरिक समाधान मैच करने के लिए संघर्ष करते हैं।

स्मार्ट पार्किंग प्रबंधन प्रणालियों के लिए LiDAR उपयुक्त क्यों है?
इसके मूल में, LiDAR दूरियों को मापने के लिए लेजर पल्स का उपयोग करके संचालित होता है। ये माप पर्यावरण का एक सघन, त्रि-आयामी प्रतिनिधित्व उत्पन्न करते हैं - जिसे "बिंदु बादल" के रूप में जाना जाता है। कैमरा इमेजरी के विपरीत, यह डेटा परिवेश प्रकाश स्थितियों से अप्रभावित रहता है; इसके बजाय, यह उच्च परिशुद्धता के साथ आसपास के वातावरण की ज्यामिति का वर्णन करता है।
यह 3डी डेटा पार्किंग अनुप्रयोगों के लिए कई लाभ प्रदान करता है।
सबसे पहले, LiDAR लगातार बदलती पर्यावरणीय परिस्थितियों में लगातार प्रदर्शन बनाए रखता है। ऐसे कारक जो आम तौर पर कैमरा सिस्टम से समझौता करते हैं - जैसे अंधेरा, चमक, या छाया - लेजर-आधारित मापों पर न्यूनतम प्रभाव डालते हैं। यह LiDAR को विशेष रूप से बाहरी पार्किंग स्थल, गैरेज और सड़क के किनारे के वातावरण के लिए उपयुक्त बनाता है जहां प्रकाश की स्थिति में पूरे दिन उतार-चढ़ाव होता है।
दूसरा, LiDAR दृश्य दिखावे के बजाय भौतिक संरचनाओं को पकड़ता है। वाहन, रास्ते, बाधाएं और पैदल यात्री सभी को त्रि-आयामी वस्तुओं के रूप में पहचाना जाता है। यह एल्गोरिदम को गलत व्याख्या की संभावना वाली दो-आयामी छवियों का विश्लेषण किए बिना वस्तुओं को विश्वसनीय रूप से पहचानने और ट्रैक करने में सक्षम बनाता है।
अंत में, LiDAR डेटा गोपनीयता-सचेत निगरानी का समर्थन करता है। चूंकि यह तकनीक दृश्य विवरण के बजाय दूरी को मापती है, इसलिए यह पहचानने योग्य विशेषताओं - जैसे मानव चेहरे या लाइसेंस प्लेट - को तब तक कैप्चर नहीं करती है जब तक कि अतिरिक्त सेंसर द्वारा पूरक न हो। सख्त डेटा सुरक्षा आवश्यकताओं का सामना करने वाली नगर पालिकाओं और ऑपरेटरों के लिए, यह एक महत्वपूर्ण लाभ हो सकता है। सामूहिक रूप से, ये विशेषताएँ LiDAR को डेटा-संचालित पार्किंग सिस्टम के लिए एक शक्तिशाली आधार बनाती हैं।

अधिभोग निगरानी: व्यावहारिक पार्किंग प्रबंधन प्रणाली अनुप्रयोगों में LiDAR।
पार्किंग वातावरण में LiDAR के सबसे प्रत्यक्ष अनुप्रयोगों में से एक वाहन अधिभोग की निगरानी है।
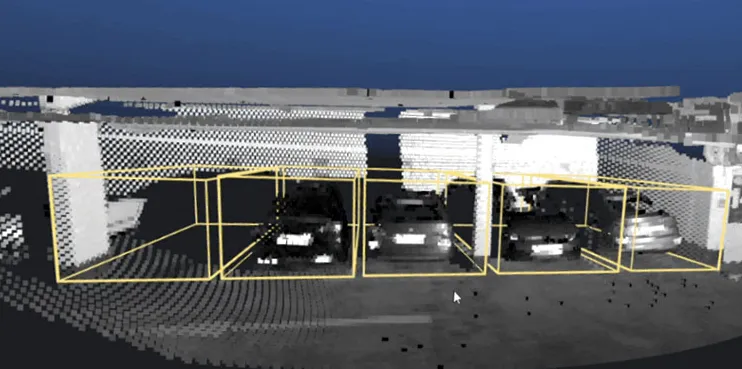
एक विशिष्ट इंस्टॉलेशन परिदृश्य में, LiDAR सेंसर मौजूदा बुनियादी ढांचे पर लगाए जाते हैं - जैसे कि प्रकाश खंभे या भवन के अग्रभाग - जो पार्किंग स्थल या सड़क क्षेत्र को देखते हैं। सेंसर लगातार अपने परिवेश को स्कैन करते हैं, जिससे 3डी डेटा बिंदुओं की एक धारा उत्पन्न होती है। सॉफ़्टवेयर वस्तुओं का पता लगाने, उनके सटीक स्थान निर्धारित करने और उन्हें वर्गीकृत करने के लिए वास्तविक समय में इस डेटा को संसाधित करता है।
सिस्टम के भीतर पार्किंग स्थान निर्दिष्ट किए जा सकते हैं। जब कोई वाहन निगरानी क्षेत्र में प्रवेश करता है, तो सेंसर उस वस्तु की पहचान करके बिंदु बादल के भीतर उसका पता लगाते हैं जो पहले मौजूद नहीं थी। पता लगाए गए बिंदु पार्किंग स्थान की अधिभोग स्थिति में बदलाव को ट्रिगर करते हैं। जब वाहन प्रस्थान करता है, तो स्थान को बाद में फिर से उपलब्ध के रूप में चिह्नित किया जाता है।
LiDAR डेटा की अत्यधिक उच्च परिशुद्धता के कारण, प्रत्येक निगरानी क्षेत्र के भीतर पाई गई वस्तुओं के लिए आकार सीमाएँ स्थापित की जा सकती हैं। यह सुनिश्चित करता है कि छोटी वस्तुएं - जैसे शॉपिंग कार्ट, मलबा, या गुजरते पैदल यात्री - गलत अधिभोग की घटनाओं को ट्रिगर नहीं करते हैं। किसी पार्किंग स्थान को केवल तभी अधिगृहीत के रूप में चिह्नित किया जाता है जब पता लगाई गई वस्तु पूर्व निर्धारित मापदंडों (उदाहरण के लिए, वाहन के विशिष्ट आयाम) से अधिक हो जाती है। यह कॉन्फ़िगर करने योग्य फ़िल्टरिंग तंत्र पहचान सटीकता को बढ़ाता है, लगातार वाहन आंदोलन की विशेषता वाले जटिल वातावरण में भी विश्वसनीय अधिभोग डेटा सुनिश्चित करता है।
क्योंकि LiDAR व्यापक स्थानिक जानकारी कैप्चर करने में सक्षम है, एक एकल सेंसर अक्सर एक साथ कई पार्किंग स्थानों की निगरानी कर सकता है। संरचित वातावरण में - जैसे कि पार्किंग स्थल या स्पष्ट रूप से परिभाषित सीमाओं के साथ कर्बसाइड क्षेत्र - एक एकल स्थापना प्रभावी ढंग से पूरे क्षेत्र को कवर कर सकती है।
जबकि यह जानना उपयोगी है कि पार्किंग स्थान पर कब्ज़ा है या नहीं, यह समझना कि "क्या" उस पर कब्ज़ा कर रहा है और भी अधिक मूल्यवान हो सकता है।
LIDAR आधारितपार्किंग प्रबंधन प्रणालीवाहनों को उनके आकार और आकार के आधार पर वर्गीकृत कर सकते हैं। पॉइंट क्लाउड के भीतर कैप्चर की गई 3डी ज्यामिति का विश्लेषण करके, एल्गोरिदम यात्री कारों, वैन, ट्रकों या दोपहिया वाहनों जैसी श्रेणियों के बीच अंतर कर सकता है।
यह जानकारी व्यावहारिक अनुप्रयोगों की एक विस्तृत श्रृंखला के द्वार खोलती है। उदाहरण के लिए, ऑपरेटर विश्लेषण कर सकते हैं कि क्या कर्बसाइड पार्किंग स्थान - जो मूल रूप से अल्पकालिक यात्री ड्रॉप-ऑफ के लिए नामित किया गया था - अक्सर डिलीवरी वैन द्वारा कब्जा कर लिया जा रहा है। इसी तरह, बड़े वाहनों से संबंधित डेटा शहरों को लोडिंग जोन या वाणिज्यिक पार्किंग स्थल के भीतर पार्किंग की मांग का आकलन करने में सहायता कर सकता है।
वाहन वर्गीकरण भी अधिक प्रभावी प्रवर्तन की सुविधा प्रदान करता है। यदि नियम कुछ प्रकार के वाहनों को विशिष्ट स्थानों का उपयोग करने से प्रतिबंधित करते हैं, तो स्वचालित निगरानी प्रणालियाँ समीक्षा के लिए संभावित उल्लंघनों को चिह्नित कर सकती हैं।
पार्किंग सुविधाओं के भीतर, वाहन वर्गीकरण डेटा ऑपरेटरों को यह समझने में मदद करता है कि विभिन्न आकार के वाहन क्षमता और यातायात प्रवाह दक्षता को कैसे प्रभावित करते हैं। जैसे-जैसे शहरी वाहन बेड़े तेजी से विविध होते जा रहे हैं - कॉम्पैक्ट इलेक्ट्रिक वाहनों से लेकर बड़े डिलीवरी ट्रकों तक - सुविधा योजना के लिए यह जानकारी और भी महत्वपूर्ण होती जा रही है।
महत्वपूर्ण बात यह है कि ये विश्लेषण दृश्य पहचान के बजाय त्रि-आयामी विशेषताओं पर निर्भर करते हैं। सिस्टम लाइसेंस प्लेटों को पढ़ने या दृश्य विवरण कैप्चर करने की आवश्यकता के बिना किसी वैन या ट्रक के आयाम और आकार वाली वस्तु की पहचान कर सकता है।
पार्किंग उद्योग धीरे-धीरे स्थिर बुनियादी ढांचे से गतिशील, डेटा-संचालित प्रबंधन में परिवर्तित हो रहा है। इस परिवर्तन के लिए निजी वाहनों, माल परिवहन, साझा गतिशीलता सेवाओं और सार्वजनिक स्थान उपयोग सहित विभिन्न प्रतिस्पर्धी मांगों को कर्बसाइड और पार्किंग स्थल की सीमित क्षमता के भीतर संतुलित करने की आवश्यकता है।
जैसे-जैसे शहर व्यापक परिवहन पारिस्थितिकी तंत्र के भीतर पार्किंग की भूमिका पर पुनर्विचार करना जारी रखते हैं, सटीक, गोपनीयता-सचेत डेटा प्रदान करने में सक्षम प्रौद्योगिकियां तेजी से महत्वपूर्ण भूमिका निभाएंगी। LiDAR तेजी से एक प्रमुख उपकरण के रूप में उभर रहा है जो ऑपरेटरों को अपने पार्किंग प्रबंधन सिस्टम के भीतर एक नए लेंस के माध्यम से पार्किंग बुनियादी ढांचे को देखने में सक्षम बनाता है।
जांच भेजें




X
हम आपको बेहतर ब्राउज़िंग अनुभव प्रदान करने, साइट ट्रैफ़िक का विश्लेषण करने और सामग्री को वैयक्तिकृत करने के लिए कुकीज़ का उपयोग करते हैं। इस साइट का उपयोग करके, आप कुकीज़ के हमारे उपयोग से सहमत हैं।
गोपनीयता नीति